
3.1. Considerações Iniciais
A ideia da transformação de um par de rodas de fricção em um par de rodas dentadas a partir da criação de denteado nas mesmas, data de alguns milênios antes da era Cristã, porém o conceito de engrenagem, como temos hoje é bem recente, tendo-se notícias dos seus primeiros estudos a partir do século XIX. Explicando melhor só podemos denominar engrenagem ao par que mantém a relação de transmissão constante em qualquer instante de tempo, ou seja, para ser chamado de engrenagem o par composto pela “roda dentada 1” com a “roda dentada 2” terá que ter necessariamente \(\varphi_{12}=cte.\) por exemplo quando a “roda dentada 1” girar de 1o, 2o, 3o ou qualquer ângulo a uma determinada velocidade. Na prática, apenas com a colocação de dentes ao acaso, não se irá conseguir isto em hipótese alguma, desta forma o que se tinha antes e ainda se tem hoje quando se criam rodas com dentes sem nenhum critério são as chamadas “rodadas dentadas”.
Explicando mais refinadamente:
- \(\varphi\neq cte.\Rightarrow\) RODA DENTADA
- \(\varphi= cte.\Leftrightarrow\) ENGRENAGEM \(\subset\) RODA DENTADA
Observação:
Toda engrenagem é também uma roda dentada, mas nem toda roda dentada é uma engrenagem. Em outras palavras o conjunto das engrenagens é um subconjunto das rodas dentadas.
A aplicação mais clássica das rodas dentadas se deu nos engenhos de cana de açúcar em plena carga nos séculos XVIII, XIX e começo do século XX, figura 3.1 abaixo. Nos dias de hoje, com as modernas técnicas de fabricação e custos cada vez menores, dificilmente se encontram mecanismos baseados em rodas dentadas, porém ainda iremos encontrar em alguns brinquedos gerados em conformação plástica, mecanismos de relógios de parede e também nas rodas conformadas em alumínio e ferro fundidos.
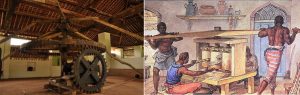 Figura 3.1 – Aplicações das rodas dentadas na moagem da cana.
Figura 3.1 – Aplicações das rodas dentadas na moagem da cana.
Desnecessário dizer que as rodas dentadas não se prestam a grandes velocidades, tão pouco a trabalhar com torques elevados, devido a choques e vibrações entre os dentes, de tal sorte que, a partir da revolução industrial, onde a necessidade de maquinários de maior potência e velocidade se fez sentir, necessitou-se da aprimoração e normatização de estudos teóricos acerca de determinados perfis que, quando aplicados aos dentes propiciavam uma relação constate. Destes perfis, dois sobressaíram-se pela sua simplicidade e consolidação matemática bem definidas. Estes, objetivos dos nossos estudos a seguir.
3.2. Perfis Conjugados
Para conseguirmos que uma roda dentada tenha velocidade constante (engrenagem), se faz necessária a busca de perfis dos dentes bem definidos e em contato direto durante o movimento, quando obtemos isto, dizemos que os perfis encontrados são conjugados, ou que os perfis se conjugam, mais ainda, quando dois perfis de dente se conjugam nós dizemos que ele obedecem à Lei Fundamental do Engrenamento, que iremos abreviar por LFE.
A busca por perfis conjugados não é tão simples, porém a determinação da LFE, que vai nos dar luz à esta procura, é bastante simples como poderemos ver, a partir da figura 3.2 abaixo. Entendamos que a barra A, pivotada (par cinemático rotativo) em OA, tem velocidade \(\omega_A\) anti-horária e faz contato com a barra B, esta pivotada em OB, no ponto P, fazendo com isto que a barra B tenha velocidade \(\omega_B\) horária. As distâncias dos pontos OA, e OB ao ponto P, são \(\rho_A\) e \(\rho_B\) respectivamente. No ponto do contato P, a parte relativa à barra A tem velocidade \(v_{P_A}\) e a parte relativa à barra B tem velocidade \(v_{P_B}\), estas perpendiculares aos vetores \(\rho_A\) e \(\rho_B\) respectivamente.
 Figura 3.2 – Lei Fundamental do Engrenamento.
Figura 3.2 – Lei Fundamental do Engrenamento.
Agora vamos projetar estas velocidades na reta normal ao contato, que passa pelo ponto P naturalmente, obtendo as velocidades \(v’_{P_A}\) e \(v’_{P_B}\). Aqui a nossa premissa é \(v’_{P_A}\) tem que necessariamente ser igual a \(v’_{P_B}\), pois se não o for poderemos tecer duas considerações, a primeira seria \(v’_{P_B}>v’_{P_A}\) e ai é fácil ver que a barra B estaria se afastando da barra A no ponto P, e a segunda seria \(v’_{P_B}<v’_{P_A}\) e ai nós entenderíamos que a barra B estaria penetrando na barra A exatamente pelo ponto P. É claro, estas duas hipóteses são absurdas e concluímos que necessariamente \(v’_{P_A}=v’_{P_B}\) para que haja contato, sem penetração ou afastamento, durante o movimento.
Sendo assim:
\[v_{P_A} \cos\theta_A=v_{P_B} \cos\theta_B\]
Ou ainda:
\[\omega_A \rho_A \cos\theta_A=\omega_B \rho_B \cos\theta_B\]
O que equivale a dizer que:
\[\begin{equation}
\frac{\omega_B}{\omega_A}=\frac{\rho_A \cos \theta_A}{\rho_B \cos \theta_B} \tag{3.1}
\end{equation}\]
Notando agora que o ângulo \(\widehat{CO_A P}\) é igual a \(\theta_A\), pois \(v_{P_A}\) é normal a \(\overline{O_AP}\) e \(\overline{O_AC}\) é normal a \(\overline{CP}\), concluímos que:
\[\rho_A \cos \theta_A=\overline{O_AC}\]
Da mesma forma, podemos perceber que \(\widehat{DO_B P}\) é igual a \(\theta_B\) e a partir das mesmas considerações a acima chegar a:
\[\rho_B \cos \theta_B=\overline{O_BD}\]
Desta forma então, a equação (.1) se torna:
\[\begin{equation}
\frac{\omega_B}{\omega_A}=\frac{\overline{O_AC}}{\overline{O_BD}} \tag{3.2}
\end{equation}\]
Do fato de o triângulo \(\Delta O_A CI\) ser semelhante ao triângulo \(\Delta O_B DI\), podemos concluir que:
\[\begin{equation}
\frac{\overline{O_AC}}{\overline{O_BD}}=\frac{\overline{O_AI}}{\overline{IO_B}} \tag{3.3}
\end{equation}\]
Comparando a equação (3.3) com a equação (2), chegamos a:
\[\begin{equation}
\frac{\omega_B}{\omega_A}=\frac{\overline{O_AI}}{\overline{IO_B}} \tag{3.4}
\end{equation}\]
Que é a chamada Lei Fundamental do Engrenamento (LFE) que podemos interpretar da seguinte forma:
LFE:
A relação de transmissão entre duas barras pivotadas será constante quando a intersecção da normal ao contato com o segmento que une os dois pivôs \(\overline{O_AO_B}\) for invariável durante todo o movimento.
Ou seja, pela equação (3.4), como os pivôs \(O_A\) e \(O_B\) são fixos, a relação \(\varphi_{AB}=\frac{\omega_B}{\omega_A}\) será constante se o ponto \(I\) também for fixo. Pela sua importância na LFE, o ponto \(I\) recebe o nome de “Ponto Primitivo”.
Perceba que aqui, nós não estamos tratando de um movimento completo (360o) da barra A e sim de uma pequena variação angular. Se nesta pequena variação angular o ponto \(I\) permanecer invariável, nós teremos relação de transmissão constante para esta pequena variação angular, veja isto no vídeo 1, abaixo. Nosso próximo passo será a procura de curvas ou pequenos trechos de curva que propicie esta característica de, para pequenas variações angulares, tornar o ponto \(I\) invariável.
Vídeo 3.1 – Pequenos deslocamento angulares.
Por hora, vejamos o vídeo 3.2, a seguir, que ilustra a necessidade de curvas conjugadas, bem como os dois tipos principais e explica como ocorre a variação na relação de transmissão quando as curvas não se conjugam.