
Para um período completo de elevação e retorno do seguidor, se faz necessária a colocação dos trechos de elevação e retorno no seu devido tempo, dependendo do diagrama de elevação utilizado, como visto no início do tópico “Curvas de Elevação”, a análise vai diferir nas situações em que as curvas de elevação e retorno se tocam (diagramas do tipo E-Rt e E-Rt-Rp), porém o caso mais geral e mais complexo, no sentido de se obter curvas que satisfaçam a LFPC, surge quando se utiliza o diagrama E-Rp-Rt-Rp, pois ai não temos contato entre elevação e retorno, para entender melhor este caso, vamos tomar como base os diagramas mostrados na figura 1, abaixo.
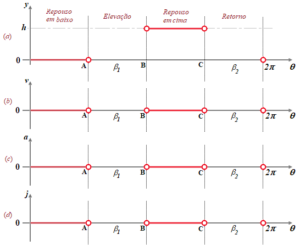 Figura 1 – Estudo de montagem das curvas de Elevação e Retorno
Figura 1 – Estudo de montagem das curvas de Elevação e Retorno
Nesta figura, temos um esboço inicial para os gráficos de deslocamento (a), velocidade (b), aceleração (c) e jerk (j), e podemos notar que os espaços para a elevação e para o retorno ficaram em branco, isto é, não foram preenchidos pelo simples fato de que devemos analisar a curva que será ai colocada no sentido de ao final o gráfico completo obedecer à LFPC, neste sentido vamos nos ater à curva de elevação, trecho \( \overline {AB}\) de comprimento \(\beta_1\) que representa o ângulo de elevação, visto que tudo o que verificarmos para a elevação também se aplica ao retorno, trecho em \(\beta_2\). Com relação ao gráfico (b), velocidade, não teremos problemas, uma vez que o princípio da escolha de cada curva requer que a velocidade seja nula no início e final da elevação, portanto iremos ter sempre este gráfico contínuo e diferenciável em todo o seu período, já para o gráfico (c), aceleração, a LFPC exige que esta seja nula também no início e final do movimento, e finalmente para o “jerk”, gráfico (d), a LPFC só exige que ele seja finito, não aceitando situações em que a função não é definida no ponto (infinito), porém do ponto de visto de um projeto otimizado, o ideal seria que este também tivesse função nula nas extremidades.
É claro que as considerações acima irão limitar em muito a escolha das curvas de elevação e retorno em cada tipo de projeto, mas antes disso, vejamos agora como faremos o procedimento de montagem, por ora sem se preocupar com esta análise mais detalhada, até porque isto também irá depender de outros fatores relativos à geometria do came e do seguidor como veremos mais adiante. A montagem é simples e, após definidas as curvas a serem utilizadas, bem como os trechos de repouso, e seus respectivos ângulos a tarefa irá consistir simplesmente em se compor funções a partir de deslocamentos na direção horizontal. Para um melhor entendimento, aqui iremos utilizar a letra grega \(\beta\) para cada trecho, diferenciando cada um deles pelo índice utilizado, sendo assim \(\beta_1\) será utilizado para a elevação, \(\beta_2\) para o retorno, \(\beta_{ri}\) para o repouso inferior e \(\beta_{rs}\) para o repouso superior, eventualmente quando houver apenas um repouso também podemos utilizar \(\beta_0\) para representá-lo.
1. Estudo Prático
Para um melhor entendimento, vamos estudar o assunto a partir de uma aplicação prática. Seja então um projeto em que já foi definida uma curva de elevação do tipo “Dupla Harmônica” no seu início a um ângulo de elevação \(\beta_1\) e do tipo “Simples Harmônica” no seu final a um ângulo de elevação \(\beta_2\), a elevação total é \(h\) e haverá um trecho final de repouso \(\beta_0\) até completar o ciclo, figura 2.
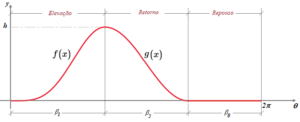 Figura 2 – Composição das curvas em um ciclo completo.
Figura 2 – Composição das curvas em um ciclo completo.
Para este caso então, as curvas escolhidas são:
- A Dupla Harmônica para a elevação;
\[\begin {equation}
f(\theta)=\frac{h}{2}[1-\cos {\frac{\pi}{\beta} \theta} – \frac{1}{4}(1-\cos {\frac{2\pi}{\beta} \theta})]
\end {equation}\]
- A Harmônica Simples para a retorno.
\[\begin {equation}
f(\theta)=\frac{h}{2}(1-\cos{\frac{\pi}{\beta}\theta})
\end {equation}\]
Perceba que a Harmônica Simples, equação (2), aqui está em seu estado natural, ou seja expressão da elevação, portanto, antes de utilizá-la, devemos prepará-la para o retorno, ou seja, transformá-la em “Curva de Retorno”. Já vimos no capítulo anterior que para isto devemos efetuar um espelhamento vertical seguido de um deslocamento horizontal, chegando a:
\[\begin {equation}
g(\theta)=f(\beta-\theta)
\end {equation}\]
Onde \(g(\theta)\) é a função agora em se estado de retorno. Desta forma \(g(\theta)\) será:
\[\begin {equation}
g(\theta)=\frac{h}{2}[1-\cos{\frac{\pi}{\beta_2}(\beta_2-\theta})]
\end {equation}\]
Tendo encontrado \(g(\theta)\), precisamos ainda colocá-la em sua posição no gráfico, ou seja a mesma só se inicia em \(\theta=\beta_1\), portanto precisamos efetuar um deslocamento horizontal na mesma de \(\beta_1\), a função final será então:
\[\begin {equation*}
g(\theta)=\frac{h}{2}[1-\cos{\frac{\pi}{\beta_2}(\beta_2-(\theta-\beta_1)})]
\end {equation*}\]
Ou
\[\begin {equation}
g(\theta)=\frac{h}{2}[1+\cos{\frac{\pi}{\beta_2}(\beta_1-\theta)}]
\end {equation}\]
A parte relativa ao repouso terá efetivamente:
\[\begin {equation*}
p(\theta)=0
\end {equation*}\]
Com isto, nós podemos finalmente compor a função completa:
\[\begin {equation}
f(\theta)=\frac h2 \left \{
\begin{array}{lcl}
1-\cos {\frac{\pi}{\beta_1} \theta} – \frac{1}{4}(1-\cos {\frac{2\pi}{\beta_1} \theta}) & \text{para} & 0 \leq \theta < \beta_1\\
1+\cos{\frac{\pi}{\beta_2}(\beta_1-\theta)} & \text{para} & \beta_1 \leq \theta < \beta_1+\beta_2\\
0 & \text{para} & \beta_1+\beta_2 \leq \theta \leq 2 \pi
\end{array} \right.
\end {equation}\]
1.1 Análise da Função Obtida
Para uma análise mais detalhada, vamos necessitar de todas as derivadas, como a seguir:
\[\begin {equation}
f’(\theta)=\frac {h\pi}2 \left \{
\begin{array}{lcl}
\frac{1}{\beta_1}(\text{sen}{\frac{\pi}{\beta_1} \theta} – \frac{1}{2}\text{sen} {\frac{2\pi}{\beta_1} \theta}) & \text{para} & 0 \leq \theta < \beta_1\\
\frac{1}{\beta_2}(\text{sen}{\frac{\pi}{\beta_2}(\beta_1-\theta)}) & \text{para} & \beta_1 \leq \theta < \beta_1+\beta_2\\
0 & \text{para} & \beta_1+\beta_2 \leq \theta \leq 2 \pi
\end{array} \right.
\end {equation}\]
\[\begin {equation}
f’’(\theta)=\frac {h\pi^2}2 \left \{
\begin{array}{lcl}
\frac{1}{\beta_1^2}(\cos {\frac{\pi}{\beta_1} \theta} – \cos {\frac{2\pi}{\beta_1} \theta}) & \text{para} & 0 \leq \theta < \beta_1\\
-\frac{1}{\beta_2^2}(\cos{\frac{\pi}{\beta_2}(\beta_1-\theta)}) & \text{para} & \beta_1 \leq \theta < \beta_1+\beta_2\\
0 & \text{para} & \beta_1+\beta_2 \leq \theta \leq 2 \pi
\end{array} \right.
\end {equation}\]
\[\begin {equation}
f’’’(\theta)=\frac {h\pi^3}2 \left \{
\begin{array}{lcl}
-\frac{1}{\beta_1^3}(\text{sen} {\frac{\pi}{\beta_1} \theta} – 2\,\text{sen} {\frac{2\pi}{\beta_1} \theta}) & \text{para} & 0 \leq \theta < \beta_1\\
-\frac{1}{\beta_2^3}(\text{sen}{\frac{\pi}{\beta_2}(\beta_1-\theta)}) & \text{para} & \beta_1 \leq \theta < \beta_1+\beta_2\\
0 & \text{para} & \beta_1+\beta_2 \leq \theta \leq 2 \pi
\end{array} \right.
\end {equation}\]
Em particular, os gráficos que nos interessam são a aceleração, obtido a partir da equação (8) e o jerk, obtido da equação (9), estes podem ser vistos abaixo nas figuras 3 e 4.
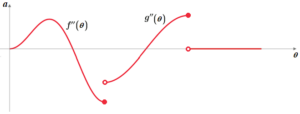 Figura 3 – Gráfico da aceleração obtido da equação (8).
Figura 3 – Gráfico da aceleração obtido da equação (8).
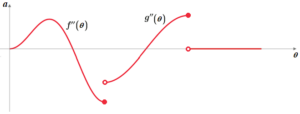 Figura 4 – Gráfico da aceleração segunda (jerk) obtido da equação (9).
Figura 4 – Gráfico da aceleração segunda (jerk) obtido da equação (9).
Por estes gráficos, vemos problemas em dois pontos, neles temos a aceleração segunda indefinida e portanto ocorrência de “jerk”. O problema se mostra na junção das duas curvas no final da elevação e também ao final do retorno.
É claro, na prática vamos evitar este tipo de ocorrência, no problema foram escolhidas curvas ao acaso e já se sabia de antemão que isto iria ocorrer, porém serviu bem para ilustrar o fato, chamando a atenção que, no projeto do mecanismo came-seguidor devemos dar a máxima importância na escolha das curvas que irão compor o deslocamento e, ao final analisarmos os seus gráficos de aceleração e jerk.
2 Exercícios
1. Considerando problemas similares ao exposto no exemplo acima, do tipo E-Rt-Rp, faça um estudo tomando a mesma curva para elevação e retorno, verifique então se é possível a ausência de jerk na junção da elevação com o retorno utilizando-se sempre \(\beta_1=\beta_2\). Das curvas estudadas até agora, diga quais serão mais eficazes para resolver este problema.
2. Desenvolva o mesmo raciocínio aplicado no exemplo acima, porém com base no exercício anterior (em que as curvas são iguais), tomando a “Dupla Harmônica” como base, verifique se haverá jerk em algum ponto da curva final.
3. Refaça o exemplo deste capítulo substituindo a curva de retorno pela curva “Cicloidal”, agora com \(\beta_1\) igual a \(\beta_2\) e analise a possibilidade de não haver jerk na subida.
4. No exemplo deste capítulo, verifique qual a relação que pode haver entre os ângulos de elevação e retorno para qua não haja jerk ao final da elevação do seguidor.